マシンテンディングを協働ロボットで自動化。導入時の確認ポイントを解説
マシンテンディングとは、工作機械へのワークの投入・取り出しを行う作業です。
定型的な作業でありながら、位置決めの精度や安定した連続稼働が求められる重要な工程の一つとなり、工場の稼働効率や品質にも影響を与えます。製造現場の生産性向上を図るには、作業員が手動で行っているマシンテンディングを協働ロボットの導入によって自動化することが重要です。
この記事では、マシンテンディングの課題と協働ロボットによる解決方法を解説します。導入メリット、ロボットの種類、選定ポイント、費用感まで、導入検討に必要な情報をすべて紹介します。
関連記事:工作機のマシンテンディングとは?自動化の課題とロボット導入事例

マシンテンディング導入ガイド 資料ダウンロード
マシンテンディングの導入をお考えの方へ。基礎知識、導入スケジュール、費用対効果を解説。導入成功のポイントがわかるガイドです。(全14ページ)
目次
マシンテンディングの自動化に役立つ協働ロボット
マシンテンディングの自動化に活用できる協働ロボットには、さまざまなタイプが存在します。代表的な協働ロボットには、以下が挙げられます。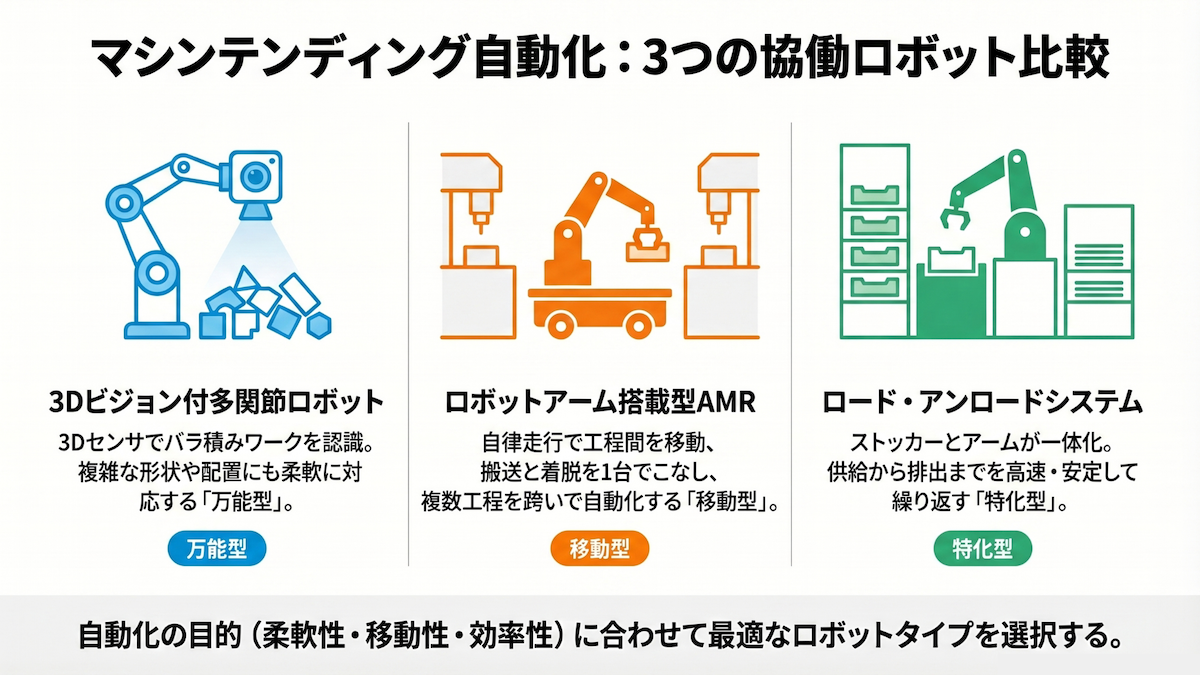
3Dビジョンセンサ付き多関節型ロボット(架台固定式・移動式)
3Dビジョンセンサ付き多関節型ロボットは、視覚情報からワークを立体的に認識して、アームによるピック&プレースを行える協働ロボットです。
形状(縦・横・奥行)や位置といった物体情報を取得する視覚センサーと、物体を立体的に認識する画像処理システム、処理結果をアウトプットするロボットで構成されています。
人間の目のように物体を3次元的に認識できる3Dビジョンセンサが備わっているため、バラ積みされたワークにも対応でき、複雑かつ柔軟な作業を行うことが可能です。
特定の工作機械や工程間に設置する「架台固定式」と、必要に応じて設置場所を柔軟に変えられる「移動式」のタイプがあります。
▼3Dビジョンセンサ付き多関節型ロボットの活用シーン
- バラ積みされた部品をピックアップして工作機械へセットする
- 工作機械からワークを取り出し、整列させてコンベアに載せる
ロボットアーム搭載型のAMR(自律走行搬送ロボット)
センサーで人や障害物を回避しながら目的地まで自律走行する搬送ロボット「AMR」に、ロボットアームが搭載された協働ロボットです。
特定の工作機械へのマシンテンディングを自動化するだけでなく、1台でワークの移動・搬送まで行えるため、加工工程の無人化を図ることができます。
▼ロボットアーム搭載型のAMRの活用シーン
- 前工程のワークを取り出し、次工程まで運んで工作機械に投入する
- 加工済みワークを取り出し、検査工程まで自動で搬送する
ロード・アンロードロボットシステム
ロード・アンロードロボットシステムは、マシンテンディングの自動化に特化したシステムです。加工対象のワークを格納したストッカーや、ワークをピックアップして工作機械へ供給するロボットアーム、制御システムなどが一体化された設計になっています。
ロボットアームがストッカー内のワークを掴んで工作機械へセットし、加工が終わったらワークを取り出してパレットに並べるまでの一連の動作を1台のシステムで対応できます。
▼ロード・アンロードロボットシステムの活用例
- プレス機へ板金材料を定ピッチで送り込み、加工後に取り出しを行う
- NC旋盤へシャフト材を1本ずつ自動で連続的に供給し、加工後に機外へ排出する
関連記事:マシンテンディング自動化とは?旋盤・マシニングセンタとの連携ポイントを解説
マシンテンディングの協働ロボットを導入する際の確認ポイント
マシンテンディングの自動化には、工場の設置スペースや対象となるワーク、既存の工作機械などに応じた協働ロボットの選定が必要です。ここでは、現場に導入する前に確認しておきたい8つのポイントを紹介します。

①ワークの形状・寸法
ワークの形状(円筒形、角型、異形など)や寸法(小型〜大型)に合わせて、ロボットの先端に取り付けるグリッパー・ハンドを選択する必要があります。
また、ワークの材質によって表面の滑りやすさが異なるため、グリップ部分の摩擦力や圧力を確認して、加工対象となるワークを落とさずしっかり掴めるものを選ぶことも重要です。
協働ロボットの機種によっては、一つのグリッパー・ハンドで幅広いワークの形状・サイズに対応できる汎用タイプも存在します。
②協働ロボットのサイズ
対象ワークの寸法や製造ラインのスペースに合わせて、協働ロボットのサイズを選択することが必要です。特に大型で重量のあるワークを扱う場合には、協働ロボット本体のサイズも大きくなりやすいため、以下の点を考慮しておくことが重要です。
▼協働ロボットのサイズと合わせて考慮すること
- 設置場所の面積
- 前工程・後工程との動線
- 人が安全に作業できるスペース・通路幅
- ロボットアームの動作範囲 など
また、近年、小型の協働ロボットが人気を集めています。省スペースで既存ラインへの大きな改修が不要なうえ、安全柵も不要なケースも多く、初期投資も比較的安いため、大型ロボットの設置が難しかった工場でも導入しやすいのが特徴です。
③協働ロボットの可搬重量
可搬重量とは、協働ロボットが持ち上げられる最大の重さを指します。協働ロボットを選定する際は、「ワークの重量+グリッパーの重量」がメーカーの可搬重量を下回っていることが必要です。
特にアーム部分が長く、一定距離のある機械までリーチできる協働ロボットの場合、最大リーチ付近でワークを掴んだときの先端重量が制限される場合があります。
また、常に可搬重量の上限に近いワークを取り扱うと、ロボットへの負荷が大きくなり故障の原因にもなります。安定稼働のためには、実際の可搬重量よりも余裕を持たせて製品を選ぶことがポイントです。
④アームのリーチ・ストローク
工作機械のサイズや対象ワークの寸法を踏まえたうえで、マシンテンディングのオペレーションに必要なリーチの長さやストローク(動作範囲)を算出します。
架台固定式の協働ロボットの場合、配置場所を柔軟に変更できないため、工作機械までの距離に対応できるハンドリング能力を備えた製品が必要です。事前にシミュレーションしておくポイントには、以下が挙げられます。
▼リーチ・ストロークの確認時に考慮すること
- 工作機械のチャックや治具までアームが干渉せずに届くか
- 扉の開閉動作を行える可動域があるか
- 加工済みワークの整列や移動まで対応できるか など
⑤位置決めの繰り返し精度
マシンテンディングにおける繰り返し精度とは、協働ロボットが工作機械にワークのセットを行った際の位置決めのばらつき幅を指します。この数値が小さいほど、高い精度で安定した位置決めが可能になります。
協働ロボットを導入する際は、加工工程の品質要件を踏まえて「許容されるセット誤差」を事前に明確にして、それに適合する繰り返し精度が保証された製品を選ぶことが重要です。
なかでも精密加工において高い精度の位置決めが求められる場合は、フローティング機構(位置ズレを吸収する治具)や3Dビジョンセンサによる位置補正の技術を取り入れることが有効です。
⑥工作機械のサイクルタイム
マシンテンディングの自動化によって稼働率の向上を図るには、工作機械のサイクルタイムとのバランスを考慮して協働ロボットの能力を選ぶことが重要です。
協働ロボットの動作速度が工作機械よりも遅くなると、待ち時間が生じて稼働ロスが発生してしまい、稼働率を高める効果が十分に得られない可能性があります。
工作機械の稼働力を最大限に引き出せる動作速度を確保するために、「工具交換」「ワークの着脱」「扉の開閉」「加工済みワークの移動」などに何秒かかるか確認しておくことが欠かせません。
⑦多品種少量生産への対応
多品種少量生産の現場では、品種の切り替えに伴う「段取り替え」が作業員の労力的な負担を招きやすくなり、工作機械のダウンタイムを生じさせます。
マシンテンディングの自動化によって生産効率の向上を図るには、段取り替えによる現場の負担を減らすための機能が備わった協働ロボットが求められます。
▼段取り替えの負担を軽減する協働ロボットの例
- 設置場所を柔軟に変えられる移動式協働ロボットやロボットアーム搭載型のAMR
- ワークの形状変更に合わせてハンドを簡単に交換できるクイックチェンジ機能
- ティーチレスで多様なワークに対応できるAIや3Dビジョンセンサが備わった協働ロボット など
⑧既存の工作機械との連携可否
マシンテンディングの自動化において大きなハードルとなりやすいのが、既存の工作機械との連携性です。
▼確認すること
- 工作機械の制御盤との信号連携(I/O)が可能か
- 既存の工作機械と物理的な干渉がないか
- 加工工程の前後との連携や作業員の通行に支障はないか など
協働ロボットが自動で「扉の開閉」や「チャックの開閉」を行うには、工作機械の制御盤との信号連携(I/O)が必要です。既存の工作機械に後付けする場合には、制御盤との信号連携が可能な製品を選択することが求められます。
また、作業員との協働スペースでは、人が通る通路幅や動線も確保しなければなりません。工場内のレイアウトや工程間を結ぶ動線を踏まえて配置計画を立てることが重要です。
関連記事:マシンテンディングの導入で効果が出やすい現場の特徴を紹介!導入前に確認しておくべきポイントも解説
マシンテンディングを自動化する協働ロボットの導入例
ここでは、実際に製造現場でどのようにマシンテンディングを自動化するのか、具体的な協働ロボットの導入例を紹介します。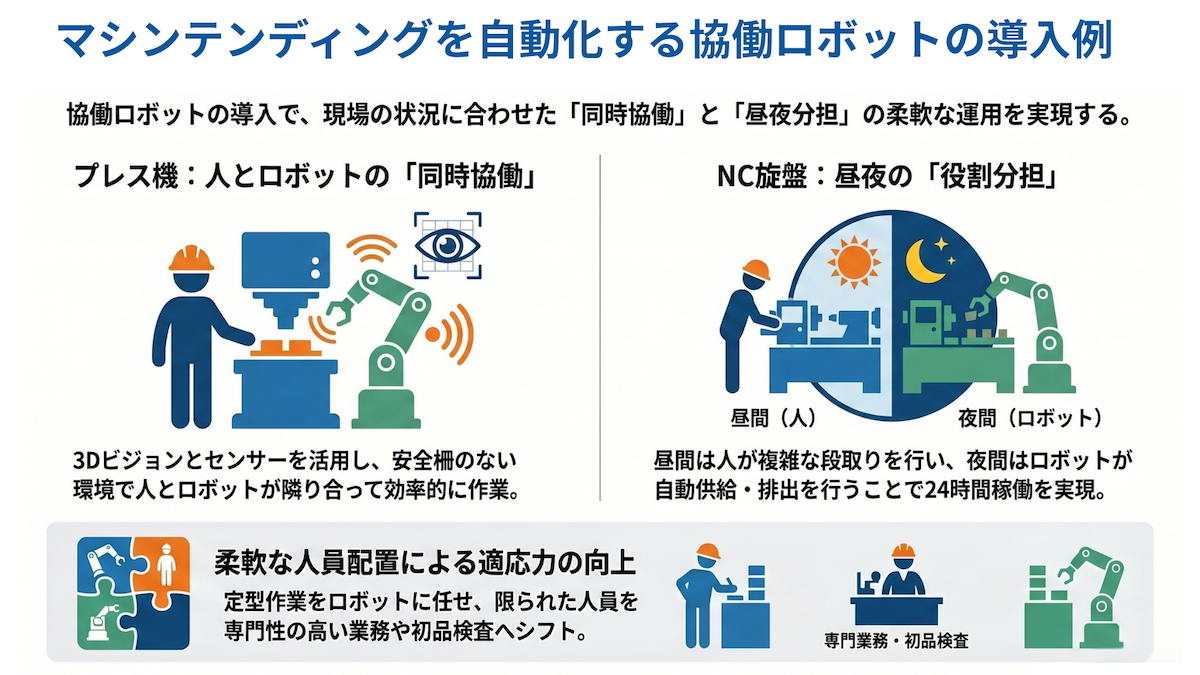
事例1. プレス加工機へのワーク投入・取り出しの自動化による協働作業
プレス加工の工程では、3Dビジョンカメラとロボット架台に設置したセーフティレーザーセンサーを組み合わせることで、ワークの着脱を自動化することができます。
▼実現すること
- バラ積み部品のピックアップ
- ワーク位置決めの自動補正
- 安全柵のない環境での協働作業
搭載されたカメラで物体を立体的に検出・認識する機能により、バラ積みの部品をピックアップすることが可能です。また、自動での位置補正が可能になることで、プレス機のチャックや治具へワークのセットを高精度に行えるようになります。
また、ロボット架台にレーザーセンサーを搭載して、人の接近を検知して低速化・停止する仕組みを導入すれば、作業員がいる場所でのワークの移動・搬送も自動化できます。
事例2. NC旋盤へのワーク自動供給・排出による夜間の無人運転
NC旋盤を利用した金属加工において、日中と夜間で有人・無人運転を切り替える活用方法があります。
▼実現すること
- 夜間でのNC旋盤の無人運転
- 作業員の柔軟な人員配置
作業員がいる日中に複雑な段取り替えや初品検査を行い、夜間は協働ロボットでワークの供給・排出を自動化して無人加工を行うことが可能です。
これにより、限られた人員を専門性の高い業務に配置できるようになるほか、夜間の時間帯を活用した加工が可能になり、稼働率の向上につなげられます。
関連記事:工作機のマシンテンディングとは?自動化の課題とロボット導入事例
マシンテンディング導入ガイド 資料ダウンロード
マシンテンディングの導入をお考えの方へ。基礎知識、導入スケジュール、費用対効果を解説。導入成功のポイントがわかるガイドです。(全14ページ)
協働ロボットによるマシンテンディングの自動化にかかる費用

マシンテンディングの自動化を検討する際、重要な指標となるのがROI(投資利益率)です。 ROIとは、投資した費用に対してどれだけの利益が得られたかを示す指標であり、投資判断の目安となる計算式は以下の通りです。
▼ROIと投資回収期間の計算式
- 投資回収期間(年) = 総投資額 ÷ 年間キャッシュフロー
- ROI(%) = 年間キャッシュフロー ÷ 総投資額 × 100
※年間キャッシュフロー:人件費削減や売上増加による現金増加額
自動化の投資判断を「感覚」ではなく「数値」で行うために不可欠な物差しです。ここでは、具体的な費用感と算出モデルを紹介します。
マシンテンディング自動化の費用感
協働ロボットによる自動化には、協働ロボット本体の費用のほか、周辺設備やシステム構築などの費用が発生します。
▼費用項目の一例
- 協働ロボットの購入費
- ハンドやワークストッカー、協働ロボット用架台の購入費
- SI(システムインテグレーション)費
- 設備連携費: 工作機械側との信号連携工費
自動化の規模や条件によって異なりますが、総額で数万円~数千万円程度の中~大規模な投資が必要になることが一般的です。
投資回収期間とROIの算出例
協働ロボットによる自動化は、稼働率向上や人件費削減といった直接的・間接的な利益の増加によって、1~3年程度で投資回収ができるケースも珍しくありません。
先述の計算式を用いた、総額1,000万円を投資した場合のシミュレーションは以下の通りです。
▼算出例(1,000万円を投資、年間320万円の効果がある場合)
| 投資回収期間 | 1,000万円 ÷ 320万円 = 約3.1年 |
|---|---|
| ROI | 320万円 ÷ 1,000万円 × 100 = 32% |
製造業の設備投資では、一般的にROIが15〜20%以上が目安とされており、このケースは非常に投資価値が高いと言えます。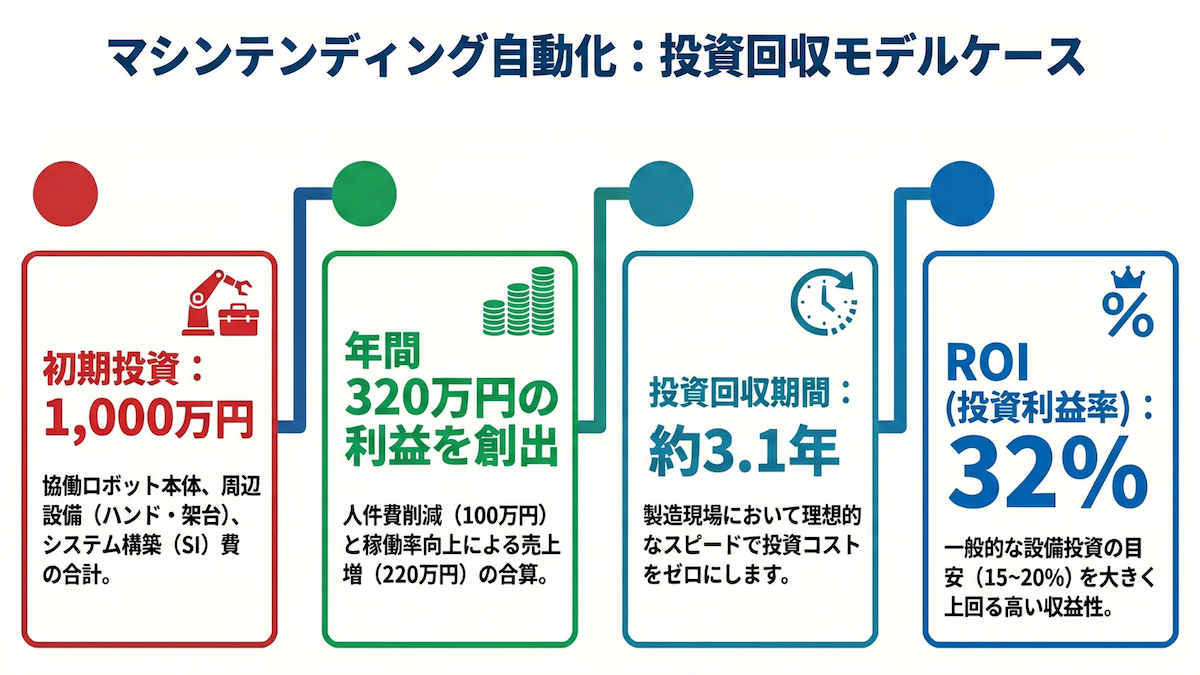
まとめ
人の手で行っていたマシンテンディングを代替する協働ロボットは、加工工程の省人化や稼働効率の向上、品質の安定化など、製造現場が抱える課題の解決に役立てられます。
既存の工作機械との連携性をはじめ、対象ワークとの適合性や工程間の動線、設置スペースなどを考慮して自社工場に合わせたシステム設計を行うことが重要です。
TMCシステムでは、マシンテンディングをはじめとする製造現場の自動化を貴社に合わせてオーダーメイド設計する多彩なソリューションを展開しています。
古い既存設備への後付けや省スペースでの設計にも柔軟に対応しており、高いコストパフォーマンスと短期間での立ち上げを実現できることが強みです。人手不足やコスト削減などに課題をお持ちの方は、ぜひご相談ください。
TMCシステムの強みや実績に関する資料をこちらからダウンロードいただけます。